Most of the FRC parts the are used on the robot have 3D model files of the item available (STEP files). The Vendor folder in the Project directory contains the models that have been downloaded. If you need to add an item that isn’t there then put it into the correct subfolder and use a file name that makes sense. For example, 1/2" Hex Rod from WCPs website might be named HEX_ROD_0500_WCP_217-2753 which tells everyone what it is, where it was downloaded from, and the part number(look at the other items there for other examples). Do not modify the vendor files directly. If you need to modify a part (e.g. shorten hex rod) then insert the component into your design and break the link between it and the vendor file. It can then be modified without changing the original vendor file.
Fasteners can also be inserted directly into a design using the Insert → Insert McMaster-Carr Component command. Search for the item you need on the McMaster-Carr website that pops up and then select "3D STEP" as the file type and click Download. McMaster-Carr has many types of fasteners including nuts, bolts, washers, e-clips, hex keys, etc.
Moving and aligning imported components is done by rotating the component to the proper orientation then using a Point-To-Point move to get the component to the correct X,Y,Z location. It is usually easiest to select circles (or arc centers) as the source and target "points".
Exercise 2
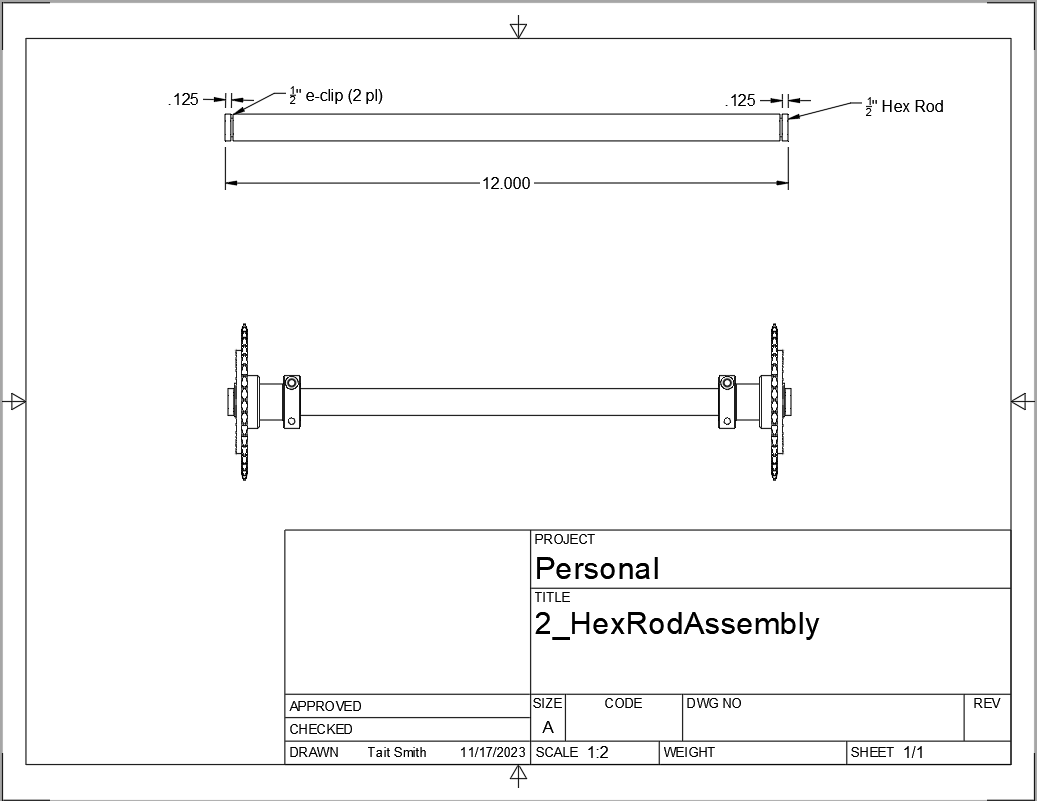
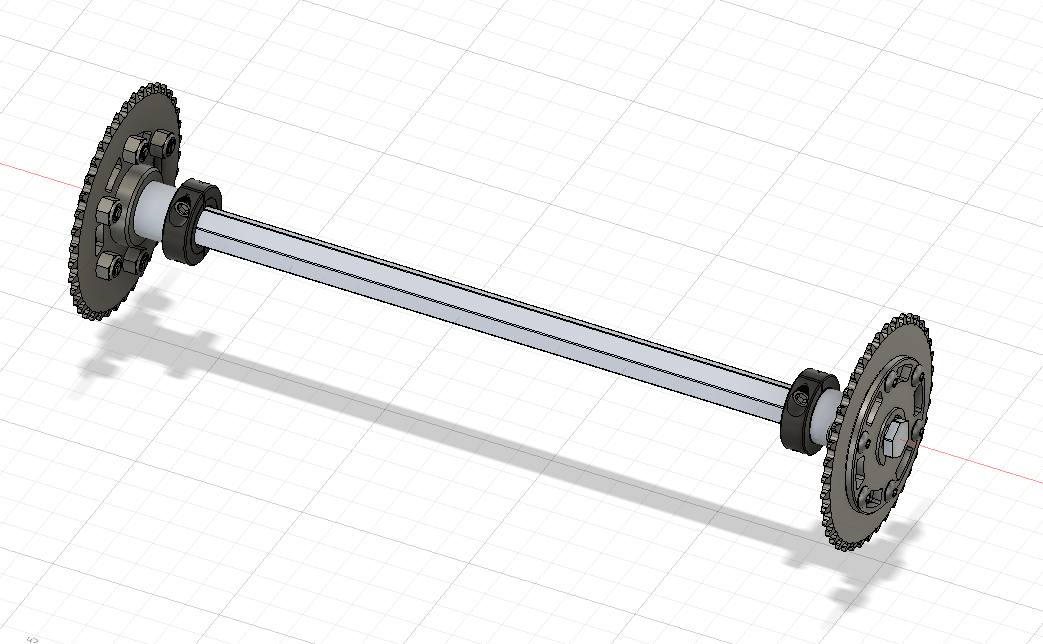
Design a hex rod shaft with a 40 tooth chain sprocket on each end as shown in the drawing below. Get the FRC specific part files from West Coast Products and use a Vendor folder to store your vendor models. Use meaningful names for your files within your Vendor folder (see above). You will need part numbers 217-2753, 217-2637, WCP-0790, WCP-0324, and 217-2592. You will also need e-clips and bolts from McMaster-Carr. McMaster-Carr parts can be inserted directly from within Fusion 360.
|
- GOALS:
-
-
Learn how to break the link to a Vendor part for modification.
-
Learn how to position inserted designs into the correct location.
-
Learn how to insert McMaster-Carr parts into a design.
|
- QUESTIONS:
-
-
What did you have to sketch for this design?
-
Did you draw the hex rod or use the Vendor model and shorten it?
-
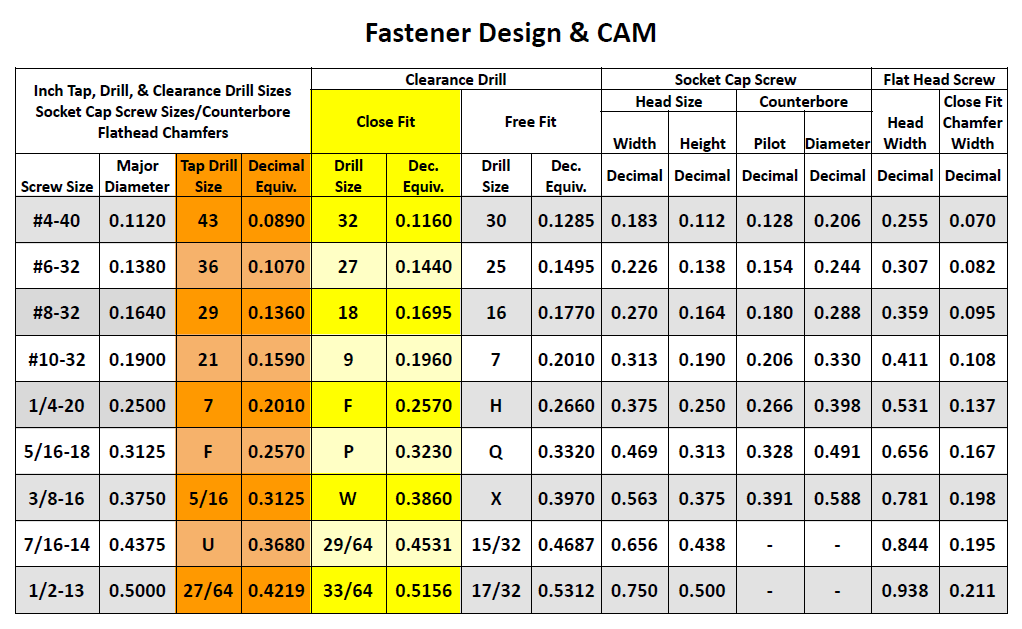
How did you determine the fastener sizes needed?
-
How did you determine the e-clip groove dimensions?
|